FKG-Roboter |
Unser Sensor-Baukasten |
Berührungsschalter
 Auf
einer schmalen Lochstreifen-Platine werden zwei Mikroschalter angelötet.
Mikroschalter können bereits durch kleine Kräfte betätigt
werden. Nachteil ist der kleine Schalthub. Machen wir aus der Not eine Tugend:
Über den Schalthebel kann man gerade ein Stück (Plastik-) Strohhalm
überstülpen, wenn man es etwas zusammenpresst. Damit stehen elastische
und mehr als ausreichend lange "Barthaare" - ähnlich den Tastorganen
einer Katze - zur Verfügung, die auf ein vernünftiges Maß
gekürzt werden können. Ein Anschluss jedes Mikroschalters wird
jeweils über Steckkabel an Masse gelegt, der andere an einen Eingangsport.
Da im Normalzustand über Pullup-Widerstände eine Spannung von 5
V an die Eingangsports gelegt ist, die bei Betätigung des Schalters
zusammenbricht, kann man mit PBRD
("PortBitReaD" in AVISE-FORTH) den Schaltzustand abfragen.
Auf
einer schmalen Lochstreifen-Platine werden zwei Mikroschalter angelötet.
Mikroschalter können bereits durch kleine Kräfte betätigt
werden. Nachteil ist der kleine Schalthub. Machen wir aus der Not eine Tugend:
Über den Schalthebel kann man gerade ein Stück (Plastik-) Strohhalm
überstülpen, wenn man es etwas zusammenpresst. Damit stehen elastische
und mehr als ausreichend lange "Barthaare" - ähnlich den Tastorganen
einer Katze - zur Verfügung, die auf ein vernünftiges Maß
gekürzt werden können. Ein Anschluss jedes Mikroschalters wird
jeweils über Steckkabel an Masse gelegt, der andere an einen Eingangsport.
Da im Normalzustand über Pullup-Widerstände eine Spannung von 5
V an die Eingangsports gelegt ist, die bei Betätigung des Schalters
zusammenbricht, kann man mit PBRD
("PortBitReaD" in AVISE-FORTH) den Schaltzustand abfragen.
Annäherungsschalter mit Infrarot-Sensoren
Eine IR-LED sendet ein IR-Signal aus, das an Gegenständen (besonders
weißen) reflektiert wird und vom Empfängerbaustein
TSOP 1736
empfangen wird. Die größte Empfindlichkeit hat TSOP 1736 bei seiner
Resonanzfrequenz von 36 kHz. Mit dem FREQ-Ausgang (PORT D,7) kann ein Signal
der geeigneten Frequenz erzeugt werden, z.B. mit $ 171 FREQ
(AVISE 2.2). Die Abfrage der Sensor-Ausgänge kann z.B. über PORT
C,7 und PORT C,6 erfolgen mit C7 PBRD. und C6 PBRD . (AVISE
2.2: PBRD Port Bit Read) .
Ab AVISE2.4 funktioniert der FREQ-Befehl
nicht mehr. Man kann sich selbst ein äquivalentes
Wort definieren.
Mit 6F FREQ ( neue Form) erhält man recht genau 36 kHz. Allgemein gilt
die Formel: f = 8 000 kHz / (2*b+1) wobei b der Wert auf dem
Stack ist, den FREQ abhebt. Mit b = 6F hex = 111
dez erhält man f = 35,87 kHz.
Vgl. Einige Grundlagen der Messtechnik
 |
Schaltung eines 1-Kanal-Abstandssensors mit IR
Aufbau auf einem Stück Lochstreifenkarte. Der Transistor wirkt als Schalter,
der, gesteuert durch den PWM-Ausgang des Prozessors, den Strom durch die
IR-LED ein- und ausschaltet. Dieser Strom wird begrenzt durch den 48
W -Widerstand. Bei 5 V Betriebsspannung ergibt
sich dann ein LED-Strom von max. ca. 100 mA. Es sollte also eher ein
größerer Widerstand verwendet werden (z.B. 100
W). Die LED und der IR-Sender sind so auszurichten,
dass der am Hindernis reflektierte Strahl der LED in den Empfänger-Baustein
TSOP 1736
(oder ähnliche, z.B. TSOP 1738 mit 38 kHz-Resonanzfrequenz) gelangen
kann.
Das Empfänger-Signal wird vom AD-Wandler-Eingang Port A0 gemessen. Die
Größe des Signals ist - bei Berücksichtigung der Resonanzkurve
des Empfängers TSOP 1736 - ein Maß für die Entfernung. |
In diesem Fall wird man den IR-Sender bei der Frequenz mit höchster
Empfindlichkeit betreiben. Eine Aktion wird eingeleitet, wenn das Signal
erstmalig von FFFF auf 0000 springt oder umgekehrt.
 |
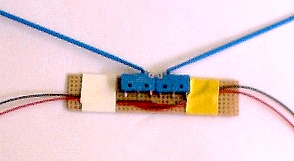
Schaltung eines 2-Kanal-Abstandssensors mit IR
Um Strom zu sparen (hier wörtlich zu nehmen), werden beide IR-LEDs
hintereinander geschaltet und durch einen gemeinsamen Transistor geschaltet.
Die LEDs und die IR-Empfänger sind so auszurichten, dass der am Hindernis
reflektierte Strahl der einen LED in den zugeordneten Empfänger-Baustein
TSOP 1736
oder ... 1738 gelangen kann.
Beim rechten IR-Empfänger sind die Anschlussbeinchen etwas zu verbiegen,
dass dieselben Leiterstreifen auf der Lochstreifen-Platine genutzt werden
können.
Das Rechteck zwischen den beiden Empfängern markiert den Platz für
ein Steckerpaar, so dass ein weiterer Sensor angeschlossen werden kann
(Betriebsspannung). |
Abstandsmesser mit Infrarot-Sensoren
Vgl. Einige Grundlagen der Messtechnik
(Abstandssensor Typ "Poor Man" oder Sharp-Sensor GP2D12)
In diesem Fall erhält man über den AD-Wandler-Eingang eine
Entfernungsinformation, die unterschiedliche Aktionen auslösen kann,
wenn man die Frequenz des IR-Signals variiert.
Licht-Sensor
Er wird verwendet, wenn der Roboter längs einer Kante fahren soll, oder
wenn der Roboter die Tischkante entdecken soll um einen Absturz zu vermeiden.
Es sind zwei Typen vorgesehen: ein "passiver "und ein "aktiver Licht-Sensor".
Der passive Lichtsensor besteht allein aus LDR's. Diese können
direkt an einen der AD-Wandler-PINs von PORT A angeschlossen werden (2. Pol
an Masse). Mit 7 AIN . wird in AVISE-FORTH direkt der Spannungsabfall am
LDR gemessen und angezeigt (im Einschaltzustand sind ja Pullup-Widerstände
vor den AD-Wandler-Eingängen zugeschaltet).
Von Fa. Gräf, Bayreuth, erhält man preiswerte LDR's. Nachteil
von ihnen ist, dass sie bei Tageslicht bereits einen sehr kleinen
Widerstand haben (Helligkeitsunterschiede fallen dann beim Spannungsabfall
kaum mehr auf), ferner, dass sie auch von hinten Licht durchlassen. Durch
einen "Blendschutz" muss man unmittelbar vor dem LDR das Tageslicht etwas
abschirmen. Von hinten sind die LDRs mit dunklem Isolierband abzukleben oder
mit schwarzer Farbe anzumalen.
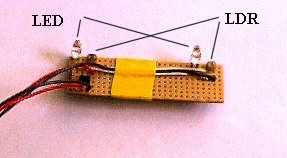 Besser
ist ein "aktiver Lichtsensor". Dabei wird mit einer superhellen LED
ein Lichtfleck erzeugt, dessen reflektiertes Licht mit einem LDR abgetastet
wird. Verwendet man 2 Lichtssensoren, kann man die LEDs hintereinanderschalten
und braucht nur mehr einen kleinen Vorwiderstand ohne zusätzlichen
"Stromverlust". Rechenbeispiel: 2 rote LED's. Flussspannung 1,6 V. R = U
/ I = ( 5 V - 2*1,6 V ) / 10 mA = 180 Ohm bei einer typischen Stromstärke
von 10 mA. Auch hier ist es nützlich, das Tageslicht durch einen
"Blendschutz" abzuschirmen.
Besser
ist ein "aktiver Lichtsensor". Dabei wird mit einer superhellen LED
ein Lichtfleck erzeugt, dessen reflektiertes Licht mit einem LDR abgetastet
wird. Verwendet man 2 Lichtssensoren, kann man die LEDs hintereinanderschalten
und braucht nur mehr einen kleinen Vorwiderstand ohne zusätzlichen
"Stromverlust". Rechenbeispiel: 2 rote LED's. Flussspannung 1,6 V. R = U
/ I = ( 5 V - 2*1,6 V ) / 10 mA = 180 Ohm bei einer typischen Stromstärke
von 10 mA. Auch hier ist es nützlich, das Tageslicht durch einen
"Blendschutz" abzuschirmen.
Noch besser ist es, wenn man IR-LED's verwendet.
Wie's funktioniert: |
 |
|
Verwendet man das Wort AIN von AVISE-FORTH zum Einlesen eines Analog-Werts
von einem der Analog-Digital-Wandler von Port A (Ausdruck z.B. mit 7 AIN
. ), dann ist im Normalfall ein Pullup-Widerstand zugeschaltet. Es kann
dann von + 5V ein Strom über diesen Pullup-Widerstand R durch den LDR
zur Masse fließen, der Spannungsabfälle hervorruft. Mit AIN wird
der Spannungsabfall am LDR gemessen. Bei Dunkelheit ist der Widerstand des
LDR einige 10 kOhm, also sehr viel größer als der Pullup-Widerstand.
Dann liegt quasi die ganze Spannung von 5 V am LDR, es wird (ungefähr)
der maximale Wert 1023 eingelesen. Fällt aber Licht auf den LDR, sinkt
sein Widerstand auf typisch 1 kOhm, der größte Teil der Spannung
fällt am Pullup-Widerstand ab und als Spannungsabfall am LDR bleibt
nur ein kleiner Wert, mit AIN wird z.B. 50 eingelesen. |
|
Abstandsmesser mit GP2D12
Der Sharp-Sensor GP2D12 (und seine Verwandten) sendet ein Infrarot-Signal
aus, das von einem Empfänger nach der Reflexion am Hindernis aufgenommen
wird. Die Entfernung ergibt sich hier aus einer Winkelmessung für das
rückkehrende Signal (Triangulation). Dieser Sensor hat eine Reichweite
von 10 - 80 cm. Das Signal ist soweit reproduzierbar, dass - nach einer
Kalibrierung - sogar quantitative Messungen möglich sind. Es leistet
daher bei physikalischen Schülerversuchen
ähnliche Dienste wie ein Sonarmeter.
Vgl. GP2D12
Vgl. auch
GP2D12
Man erhält so am AD-Wandler-Eingang ein Signal, das der Entfernung
ungefähr indirekt proportional ist. Je nach Entfernung lassen sich dann
unterschiedliche Aktionen einleiten.
Formel für die Entfernung d bei dem digitalen Wert s: d(s)
= 2141.72055*(s^-1.078867) ( 0 <= s <= 255 ). Für
genauere Werte sollte man eine Eichkurve aufstellen.
Vgl. auch einen
Testbericht
Schall-Sensor (Mikrophon)
Infrarot-Bewegungsmelder
(Körperstrahlungssensor)
http://www.as-workshop.de/sensprax/voltout.htm
unter
passiver Infratotdetektor als Näherungs- Sensor ("pyroelektrischer
Sensor")
Ultraschall-Sensor
Hierzu gibt es mittlereweile preiswerte käufliche Module SFR04, ...
(www.roboter-teile.de)
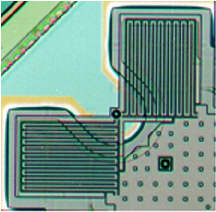
Beschleunigungsmesser, ein (für uns) sehr teuerer
Sensor für Spezialaufgaben (ca. 40 Euro)
Es gibt Sensoren, die direkt auf Beschleunigungen reagieren. Ich stelle mir
vor, dass die zwei Halbleiterplättchen mit der Widerstandssschlange
sich je nach Beschleunigung verbiegen und damit den Widerstand der Schlange
verändern. Dieser liefert dann das pulsweitenmodulierte Ausgangssignal.
 Der Sensor kann sowohl statische (Gravitation) als
auch dynamische (Vibrationen) Beschleunigungen in zwei Achsen (x und y) messen.
Der Typ ADXL 202 verfügt über einen Meßbereich von +/- 2
g, der Typ ADXL210 über +/-10g. Der Sensor liefert für beide Achsen
ein analoges- sowie ein digitales
Ausgangssignal.
Der Sensor kann sowohl statische (Gravitation) als
auch dynamische (Vibrationen) Beschleunigungen in zwei Achsen (x und y) messen.
Der Typ ADXL 202 verfügt über einen Meßbereich von +/- 2
g, der Typ ADXL210 über +/-10g. Der Sensor liefert für beide Achsen
ein analoges- sowie ein digitales
Ausgangssignal.
Für die gemessene Beschleunigung gilt typischerweise: a
= g (T1/T2 - 0,5)/0,125 beim ADXL202 bzw. a = g (T1/T2 - 0,5)/0,04 beim ADXL210.
T1/T2 = 0,5 entspricht also der Erdbeschleunigung. T1/T2 = 0,75 liefert also
beim Typ 202: a = 2 g, T1/T2 = 0,9 liefert also beim Typ 210: a = 10 g.
Mit unserem Prozessor kann das Tastverhältnis leicht gemessen werden.
Eine alternative Möglichkeit besteht darin, das analoge Signal mit unserem
AD-Wandler (Port A) zu messen.
Vgl. Datenblätter:
ADXL202EB
Evaluation Board
ADXL202
- Sensor